The term ‘programmable matter’ brings to mind scenes of nano machines swarming through the air, defying gravity, and assembling into a vase. Like a flock of birds, once disturbed, the whir off of the surface and begin to structure a new object. How these metal fairies have found homes in many a writers imagination. I admit to dreaming apocalyptic futures of nano robots gone awry.
Nonetheless, I want to talk seriously about programmable matter and its future. First coined by Tommaso Toffoli and Norman Margolus in their paper “Programmable Matter: Concepts and Realization” (which I highly recommend reading or at least skimming), the 1990 term is less common. More often we hear nanorobotics, self-assembly, self-organisation, evolutionary robotics, particle robotics, fluidic assembly, synthetic biology, or (a less common addition) artificial life. I throw each of these terms around interchangeably when discussing these field purely because each stimulates a different one of my sci-fi futures. Programmable matter is like Lego without a conceiver. Imaginge opening a sealed box of Lego, emptying its contents on the floor, and watching as the pieces wriggle and squirm, piece-by-piece, into the growth that is their final model. In the context of Lego, this is turns out to be a challenge. Even assembling four bricks in the correct order can require a large amount of time. Because a single Lego brick is so versatile, each brick can attach to most other bricks in a plethora of angles and translations. So the sci-fi future of little silver cubes is a long road. Specialisation of the pieces and constraints on the morphology of the piece is crucial.
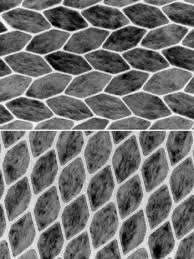
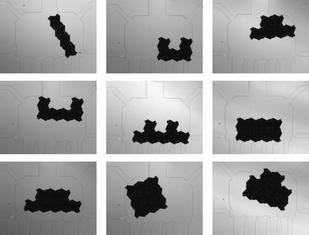
Let me talk about some of the interesting work happening in the field. First, Dr. Shuhei Miyashita’s work at the University of York on morphological properties of self-assembly is the work that captured my interest in this field. He and his lab have shown how the shape of the assembly-unit (what I like to call a zoid) has significant effects on the self-assembly properties. Below is a traingular assembly which was formed by agitation of polygonal zooids on a liquid surface. Assembly occurs by freezing the fluid connections between contacting zooids. Disassembly is simple by just unfreezing.

Next, is another long-time favourite of mine. Hod Lipson’s lab focuses on robotic self-assembly mostly. I enjoy their work because it exhibits a variety of potential projects that self-assembly can be used for. From self-replicating ‘hugging’ cubes to self-assembly in fluids. I would love to work in this lab one day.
Because these jornals must be kept tight, I only have time for one more. In the future I promise to dive into more detail of the labs I have introduced and discuss some of their research. This leaves the work of The Self-Assembly Lab, headed by Skylar Tibbits. First looks are deceiving; this is no architectures dream. Despite the crisp presentations, the underlying research is bold and technically advanced. My two favourites are the self-replicating spheres which model cellular mitosis, and autonomous mass-assembly which is the closest to automatic Lego-assembly I have seen thus far.

I am afraid these journals must remain short. Look out for more self-assembly discussions soon!