The media in this post is from the original article which you should read if you want a more thorough description of this research. Below I've briefly summarized the work and some of the results.

In this work we researched an alternative approach for physically-based character animation. We found that the problem of motion imitation with a physical character was well framed for use with world models. Our approach is faster to train than previous reinforcement learning based approaches, has improved motion tracking quality, and can scale to large datasets with a single controller.
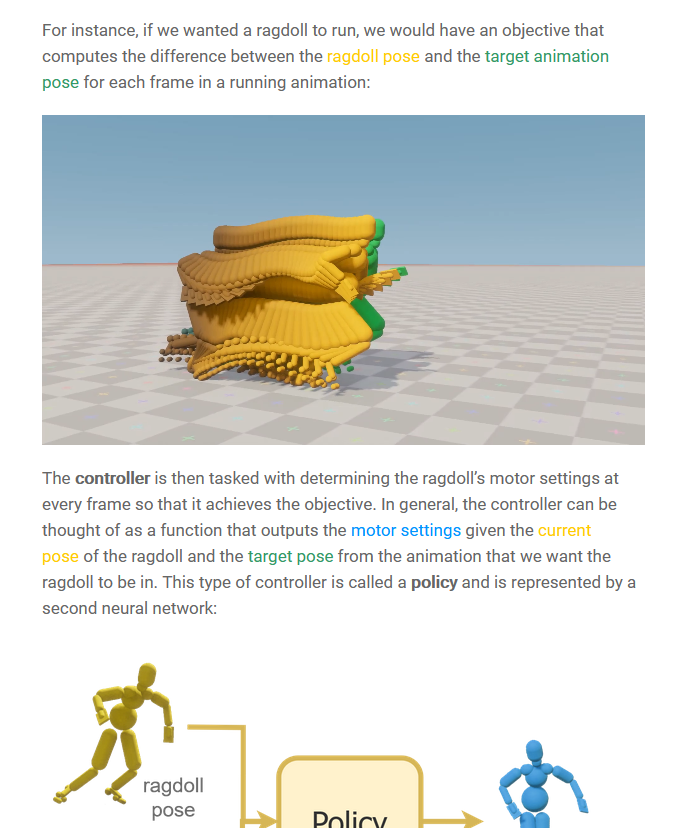
A few definitions for those who want to understand a bit more about the work. Physically-based character animation in this context means to essentially use simulated robots in place of kinematic poses for a character’s motion. This means the character has to do more than just be in different frames of an animation – it has to balance, sense, and respond to its environment. Building a general controller that can do all of these things in a single robot is unsolved. But in simulation we can ‘cheat’ and access perfect state and sensory information of the environment. This makes physically-based character animation interesting because it can also help robotics research.
A world model is a model of an agent’s environment built according to what the agent percieves. You and I both have world models. It’s easy to take your world model for a spin: plan out some task in your head like picking up a mug off a table or walking into another room. There’s a faint internal visual of how that will feel and look like when you do it.
We trained a neural network world model of an egocentric ragdoll and used it as a replacement for the physics simulation of the ragdoll. Rollouts in this world model were differentiable meaning we could directly optimize a control policy through the rollouts to track a target motion such as running or dancing. This supervised learning-based training was then pushed to its limit by training a single control policy to learn to track four-and-a-half hours of motion data.
Further, we were able to produce DreCon-based controllers with only three hours of training.
Finally, we tested how well this approach worked on rough terrain navigation. This is one of the most difficult locomotion task for physically-based characters because the character must globally align to the tracking animation.
It’s also fun seeing what the world model predictions looks like. The red character in the video below shows the predictions of the world model over a one-second horizon. It pretty much tracks the simulated ragdoll exactly!
If you are interested in more information, please see the accompanying paper and supplementary video below. If you find this research useful and use it in any of your work or writings, please cite the original paper source.
author = {Fussell, Levi and Bergamin, Kevin and Holden, Daniel},
title = {SuperTrack: Motion Tracking for Physically Simulated Characters Using Supervised Learning},
year = {2021},
issue_date = {December 2021},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {40},
number = {6},
issn = {0730-0301},
url = {https://doi.org/10.1145/3478513.3480527},
doi = {10.1145/3478513.3480527},
journal = {ACM Trans. Graph.},
month = {dec},
articleno = {197},
numpages = {13},
keywords = {imitation learning, motion capture, reinforcement learning, motion tracking, motion imitation, character animation}
}